
EPSM

Mastering Kalman Filters Quiz
Test your knowledge on Kalman filters and their applications in various systems. This quiz covers fundamental concepts, definitions, and the mathematical underpinnings involved in state estimation.
- Evaluate your understanding of Kalman and Extended Kalman filters.
- Explore the significance of uncertainty representation in sensor measurements.
- Challenge your knowledge of GPS technology and its underlying principles.
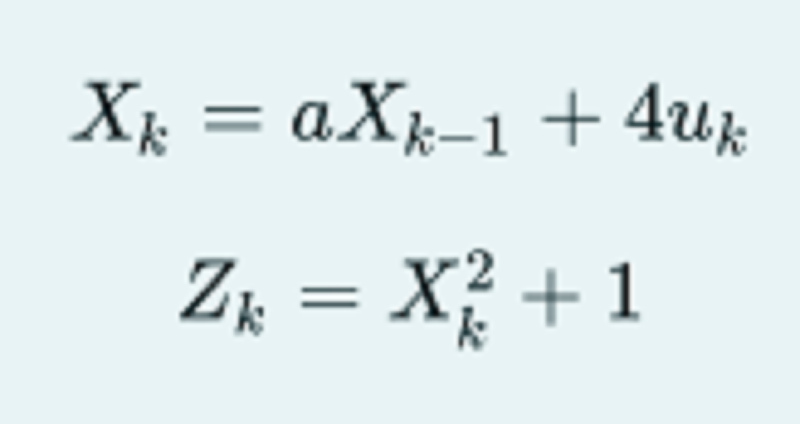
Un sistem este descris de urmatoarele ecuatii. Pentru estimarea starii se poate folosi:
Filtrul Kalman Extins
Filtrul Kalman
Oricare dintre KF/EKF si se poate alege in functie de precizia dorita.
Oricare dintre KF/EKF, insa KF este optim pe cand EKF este o aproximatie Taylor
Selectati afirmatiile adevarate despre filtrul Kalman. Selectați unul sau mai multe:
Pasul de predictie estimeaza marimile care vor fi masurate de catre senzori in starea urmatoare
Pasul de predictie estimeaza starea urmatoare a sistemului folosind modelul lui de miscare
Pasul de "update" foloseste marimile masurate de senzori pentru a rafina estimarea curenta
Pasul de predictie estimeaza starea urmatoare a sistemului folosind informatiile generate de senzori
Pasul de update foloseste modelul matematic al sistemului pentru a estima eroarea senzorilor
Ce se ințelege prin varianța (dispersia) asociată unei măsuratori? Selectați unul sau mai multe:
Indica eroarea senzorului: diferenta intre valoarea reala si valoarea masurata
Măsoara neîncrederea în masurătoare. Cu cât varianța este mai mare cu atat măsuratoarea este mai imprecisă.
Masoară plaja maxima de valori masurabile de catre senzor.
Indica eroarea senzorului: diferentata intre valoarea masurata si valoarea reala.
Măsoara încrederea în masurătoare. Cu cât varianța este mai mare cu atat măsuratoarea este mai precisă.
Alegeti afirmatia adevarata cea mai precisa! Selectați răspunsul corect:
Filtrul Complementar este mai general decat un filtru Kalman intrucat nu are nevoie de un model al unui sistem
Filtru Complementar este mai general decat un filtru Kalman datorita simplitatii
Filtrul Kalman este mai general decat un filtru complementar intrucat se poate aplica atat pentru sisteme liniare cat si pentru sisteme neliniare..
Filtru Kalman este mai general decat un filtru Complementar datorita reprezentarii incertitudinii
Filtrul Kalman este mai general decat filtrul complementar intrucat poate folosi chiar si informatii indirecte despre starea unui sistem
De ce fiecare satelit GPS contine si foloseste un un ceas atomic. Daca vi se pare ca se potrivesc mai multe raspunsuri, alegeti motivul cel mai important. Selectați răspunsul corect:
Nu exista un motiv real. Pur si simplu sistemul a fost over-engineered, sateliti fiind foarte putini relativ la numarul de utilizatori.
Efectele relativiste sunt importante pentru sateliti si este importanta ora precisa pentru functionarea sistemului.
Nici un alt tip de ceas electronic nu poate functiona corect in conditiile radiatiilor din spatiu
Satelitii nu comunica cu echipamente terestre si au nevoie de ora exacta pe toata durata de viata 5-10 ani.
Viteza luminii este foarte mare si orice eroare de timp se traduce in erori mari de pozitie
In care dintre filtrele de mai jos reprezentarea incertitudinii este cea mai generala (poate acoperi cele mai multe cazuri)? Selectați răspunsul corect:
Filtrul cu Particule
Filtrul Kalman
Filtrul complementar
Filtrul Kalman Extins
Selectati toate afirmatiile adevarate. Selectați unul sau mai multe:
In filtrul Kalman Extins incertudinea poate fi modelata prin orice tip de distributie
Filtrul Kalman este optim pentru sisteme liniare si nu are incertitudine
In filtrul Kalman incertudinea este modelata printr-o distributie normala (gaussiana)
In Filtrul Kalman Extins incertitudinea calculata este o aproximatie a incertitudinii reale.
In filtrul Kalman incertudinea poate fi modelata prin orice tip de distributie
In filtrul Kalman Extins incertudinea este modelata printr-o distributie normala (gaussiana)
Ce reprezinta un punct in spatiul starilor pentru un algoritm de SLAM implementat cu un filtrul Kalman? Selectați răspunsul corect:
Harta (pozitia landmark-urilor) & pozitia robotului
Pozitia Robotului
Harta (pozitia landmark-urilor)
Incertitudinea pozitiei robotului
Incertitudinea hartii (pozitiei landmark-urilor) & incertitudinea pozitiei robotului
Incertitudinea hartii (pozitiei landmark-urilor)
Intr-un sistem similar cu GPS se cunosc pozitiile a trei sateliti (-11, 0, 0), (9, 0, 0) si (0, 0, 4). Se cunosc si distantele absolute pana la receptor, respectiv: 11, 9, 4. Care este pozitia cea mai probabila a receptorului?
(-11, 9, 4)
(11, 9, 4)
(-11, 0, 4)
(-11, 0, 0)
(0, 0, 0)
Selectati toate afirmatiile adevarate Selectați unul sau mai multe:
Filtrul Kalman simplu se poate aplica oricarui tip de sistem liniar sau neliniar
In filtrul Kalman incertidudinea poate fi modelata prin orice metoda convenabila.
Filtrul Kalman nu foloseste in mod explicit incertitudinea masuratorilor
Filtrul Kalman simplu se poate aplica doar sistemelor liniare
In Filtrul Kalman, incertitudinea este modelata gaussian si reprezentata prin matrici de covarianta.
Filtrul Kalman nu foloseste in mod explicit incertitudinea modelului matematic
Satelitii GPS folosesc o modulatie de tip CDMA pentru transmisia semnalului/datelor. De ce a fost aleasa? Alegeti toate raspunsurile valide. Selectați unul sau mai multe:
Datorita ceasurilor atomice din sateliti CDMA s-a pretat foarte bine.
Toti satelitii pot folosi aceeasi frecventa fapt care simplifica receptia semnalelor.
TDMA/FDMA nu fusesera inca inventate (GSM a aparut mai tarziu) - desi retrospectiv ar fi fost mai bune.
A fost o decizie aproape arbitrara, sistemul fiind conceput si realizat sub presiunea timpului, datorita competitiei intre state.
Cu cresterea lungimii codului si a proprietatilor operatiei de corelatie, se imbunatateste raportul intre semnal si zgomot la receptie pentru o putere de transmisi data
Selectati toate motivele pentru care, dat fiind un sistem, se poate folosi filtrul Kalman simplu dar nu un filtru complementar. (motivele care fac diferenta intre aplicabilitatatea celor doua) Selectați unul sau mai multe:
Sistemul este liniar
Incertitudinea nu poate fi reprezentata ca o distributie normala
Senzorii masoara direct starea sistemului
Senzorii nu masoara direct starea sistemului
Sistemul este nelinar
Incertitudinea poate fi reprezentata ca o distributie normala
Selectati afirmatiile adevarate despre particule in filtrul cu particule! Selectați unul sau mai multe:
Particulele sunt puncte in spatiul starilor sistemului (stari posibile ale sistemului)
Greutatea unei particule este proportionala cu probabilitatea ca sistemul sa se afle in starea pe care o reprezinta particula respectiva
Greutatea unei particule este proportionala cu covarianta punctului (starii) pe care o reprezinta
Multimea particulelor la un moment de timp reprezinta, esantionat, distributia de probabilitate asupra starii sistemului la acel moment de timp
Multimea particulelor reprezinta multimea starilor prin care trece sistemul de-a lungul timpului
Particulele sunt momente de timp
Pozitia unui vehicol pe axa X este masurata de doi senzori independenti care returnează urmatoarele valori 1, respectiv 14. Varianța (dispersia) asociata celor doi senzori este egală. Combinând masuratorile folosind un filtru complementar obținen următoarea estimare:
Pozitia cea mai probabila: 7,5
Varianta pozitie probabile: 9,0
Pozitia cea mai probabila: 14
Varianta pozitie probabile: 4,5
Varianta pozitie probabile: 18,0
Pozitia cea mai probabila: 1
Selectati toate afirmatiile adevarate.
Este nevoie de 3 sateliti GPS vizibili pentru o localizare 3D intrucat necunoscutele sunt x,y,z.
GPS este o aplicatie pe dispozitive inteligente care permite navigarea precisa catre o destinatie aleasa.
Pozitia satelitilor GPS este cunoscuta de la lansare si este cunoscuta a priori de catre toate receptoarele GPS
Este nevoie de 4 sateliti GPS vizibili pentru o localizare 3D intrucat exista 4 necunoscute pentru receptorul de GPS.
GPS foloseste in esenta trilateratia pentru determinarea pozitiei
Pentru calculul exact al locatiei folosind GPS, efectele relativiste nu pot fi neglijate.
GPS foloseste pentru masurarea distantei metoda two-way ranging, si implicit are nevoie de ceasuri extrem de precise la transmitatoare si la receptoare
Intr-un filtru Kalman matricea H= ( a b ) Ce dimensiuni poate avea Z (masuratorile)?
Este un scalar 1x1.
Este o matrice 2x2.
Este un vector 2x1.
Este un vector 1x2
Selectati propozitiile adevarate! Selectați unul sau mai multe:
Filtrul cu particule poate fi aplicat oricarui tip de proces (liniar sau neliniar).
Filtrul cu particule poate fi aplicat direct proceselor doar liniare.
In filtrul cu particule incertitudinea este modelata ca o distributie de probabilitate reprezentata discret (esantionat)
In filtrul cu particule incertitudinea este modelata ca o distributie normala (gaussiana).
In filtrul de particule incertitudinea este modelata cu o matrice de covarianta
Filtrul cu particule poate fi aplicat direct proceselor doar neliniare.
{"name":"EPSM", "url":"https://www.quiz-maker.com/QPREVIEW","txt":"Test your knowledge on Kalman filters and their applications in various systems. This quiz covers fundamental concepts, definitions, and the mathematical underpinnings involved in state estimation.Evaluate your understanding of Kalman and Extended Kalman filters.Explore the significance of uncertainty representation in sensor measurements.Challenge your knowledge of GPS technology and its underlying principles.","img":"https:/images/course3.png"}
More Quizzes
Ts
271436
ROBO
19100
CAN Protocol
10524
Spelling en grammatica
10538
How Long Will You Survive the Zombie Apocalypse? Free
201029003
Capstone Individual Study
15822034
Free Kindergarten Counting by 10s Worksheet
201021876
Free Champions League Fan Trivia
201022195
Russia and Black America
15833079
Think You're a Whiz? 6th Grade Computer Components
201027242
Free de Países Practice Test
201022871
Free Synonym: Test Your Vocab
201023794